週間『ロビ』を組み立てる No.65~68 [Robi]
高額パーツが目白押し、
65号~68号です。
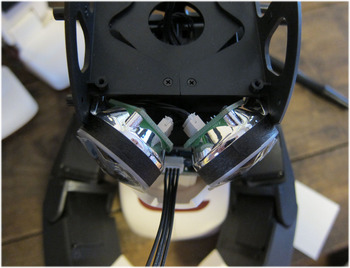
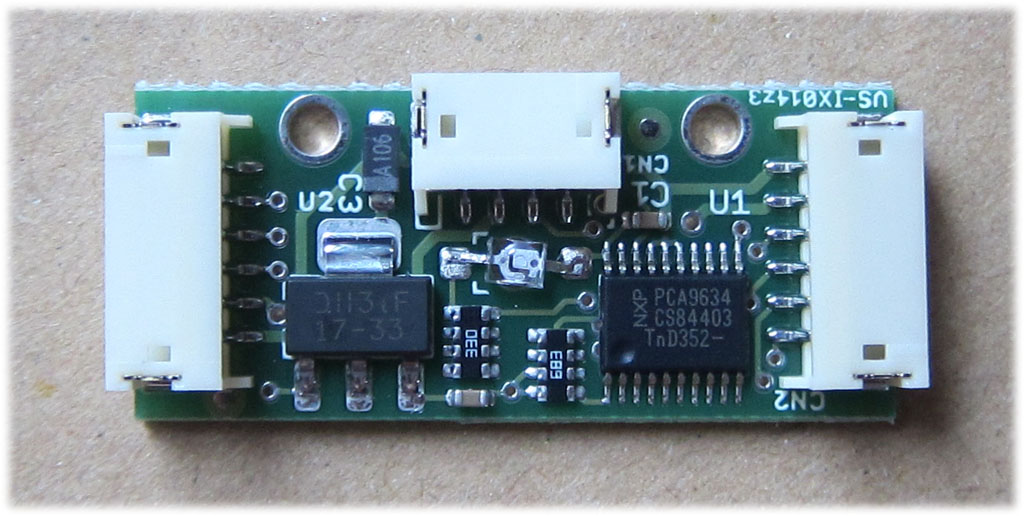
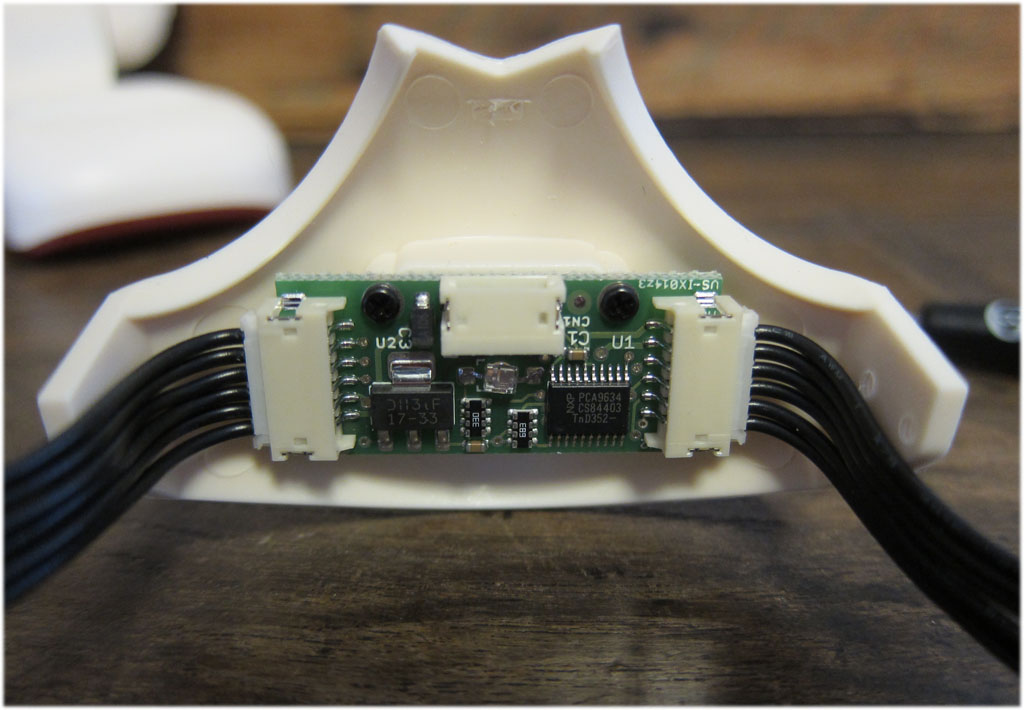
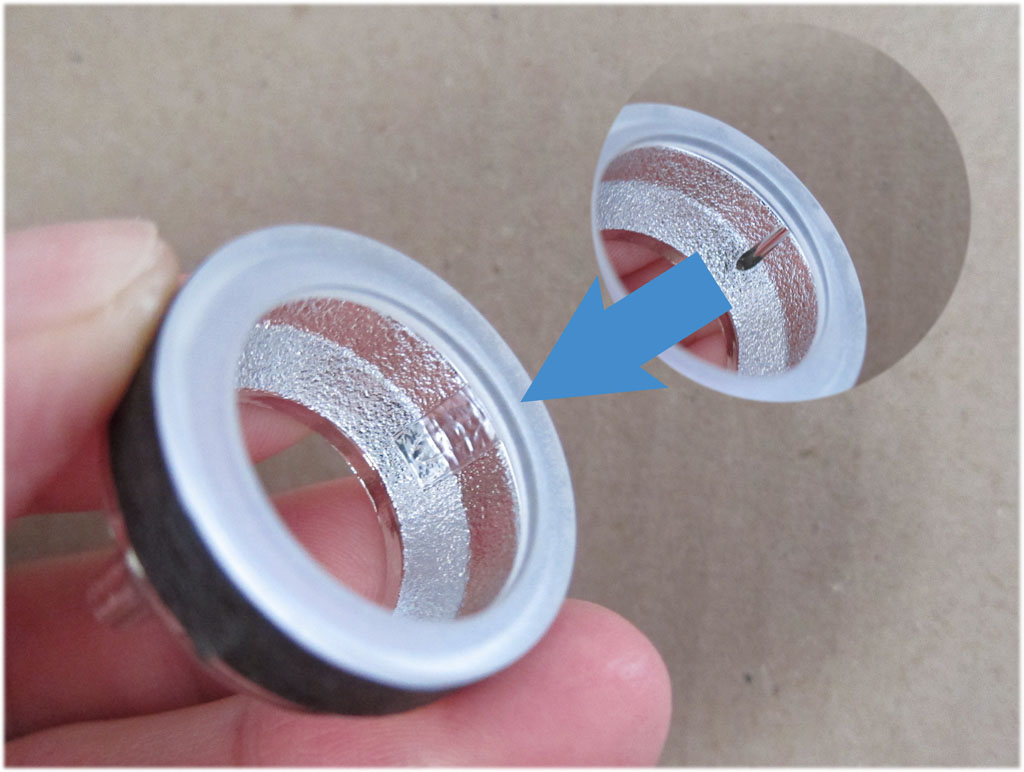
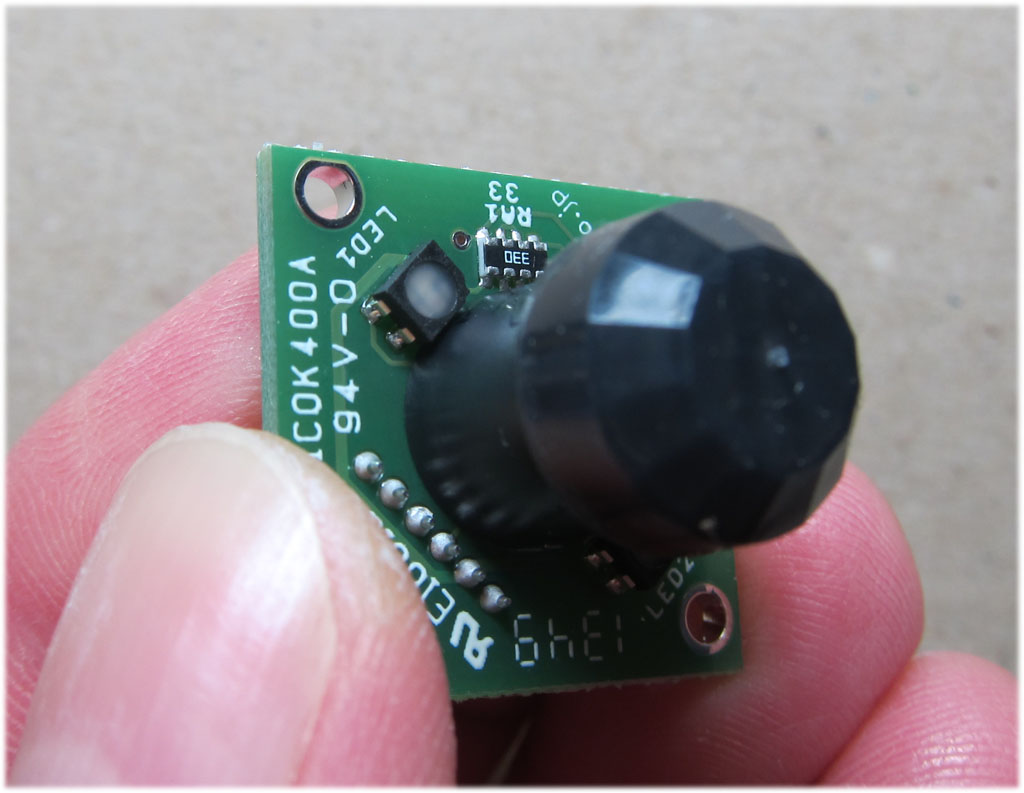
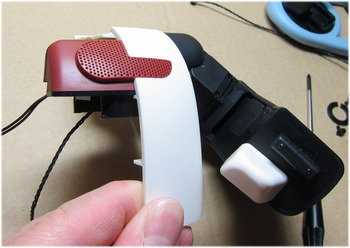
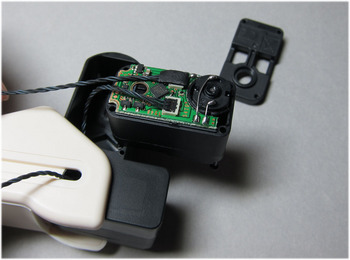
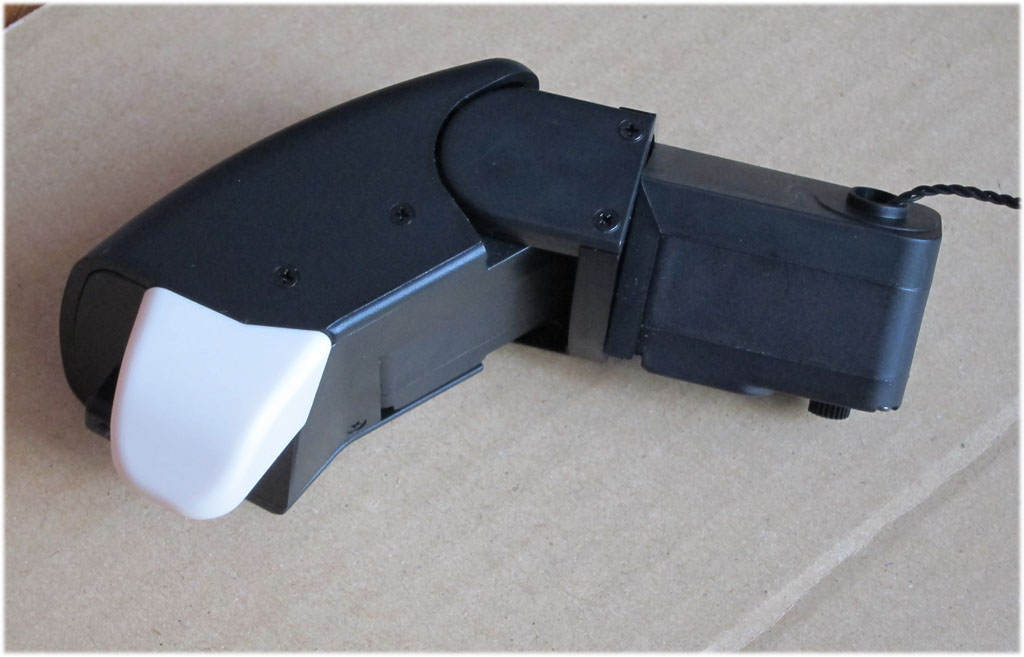
まずは口と目を接続するボードが一つ、
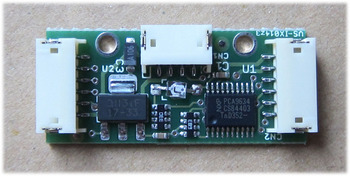
真ん中にLEDがあり、口元が赤く光るようになっています。
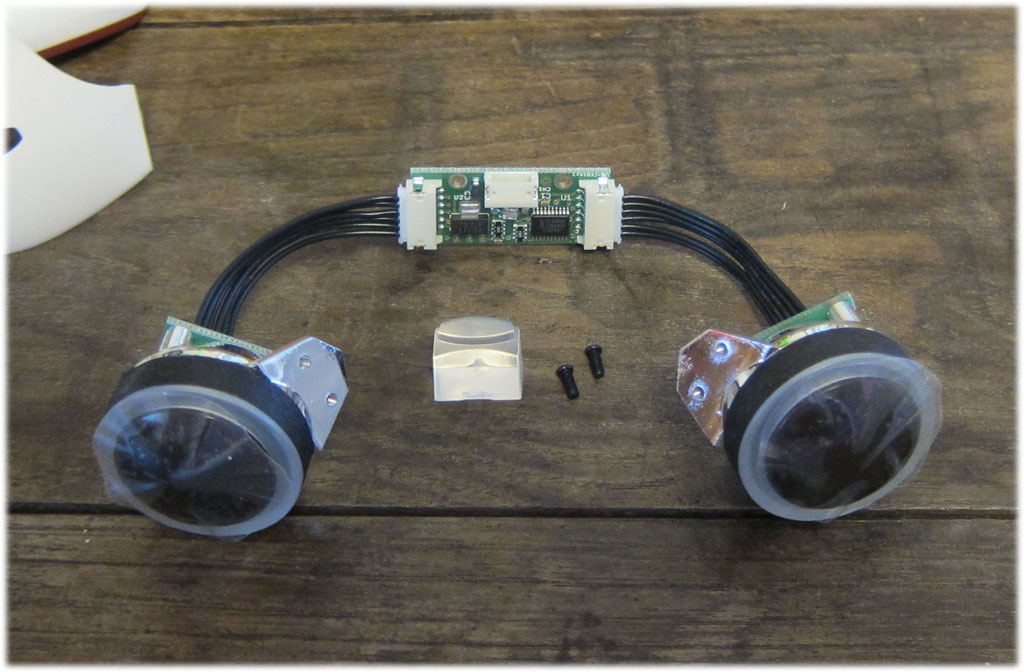
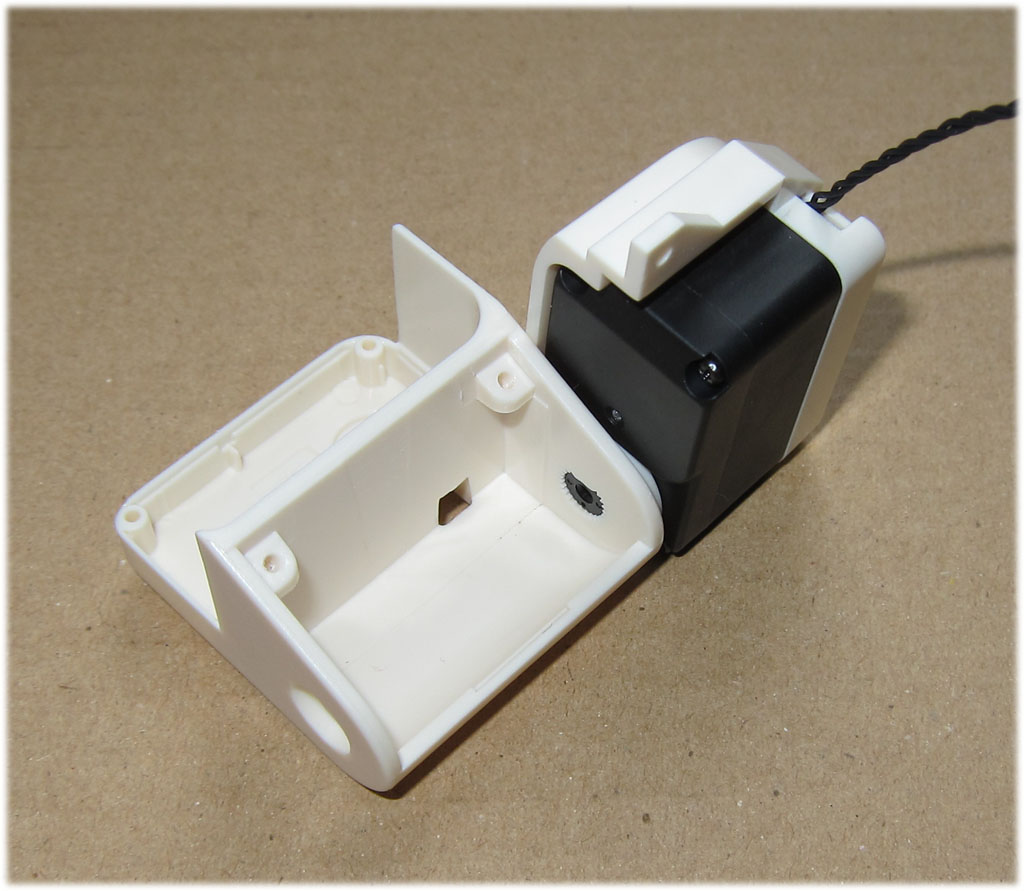
これを2つの人感センサーと接続、
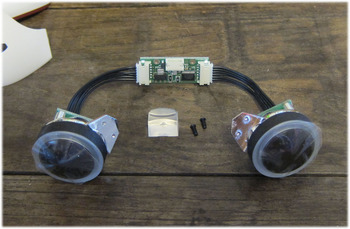
口へは透明なカバーで光を誘導します。
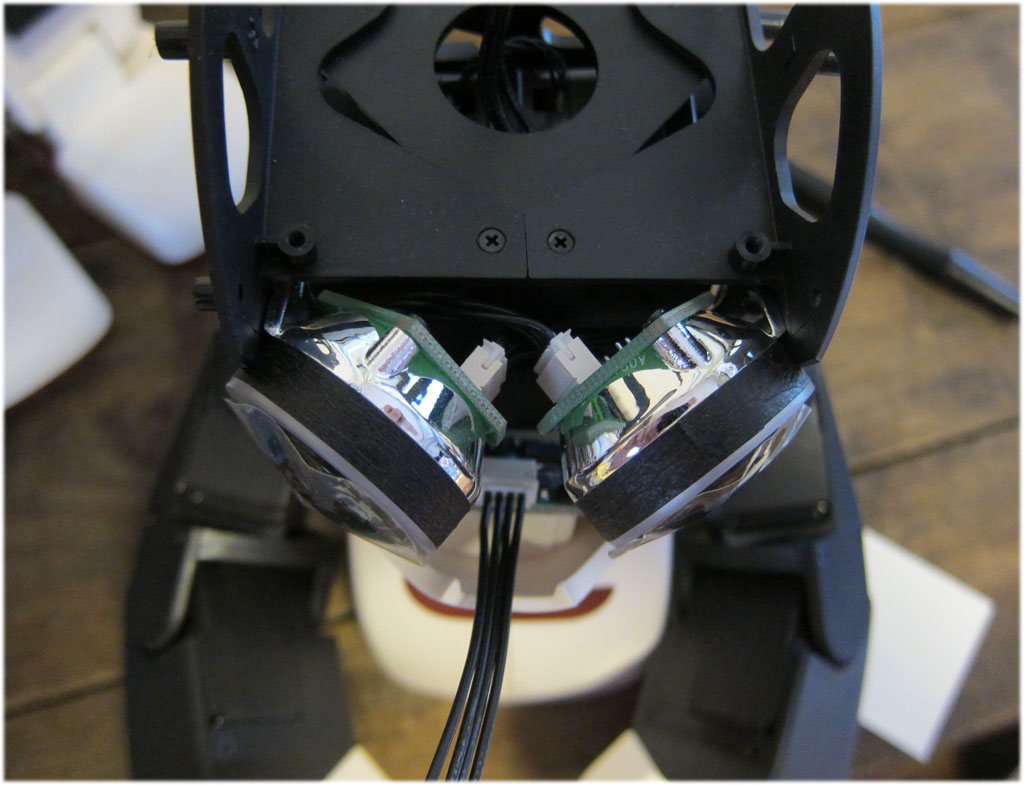
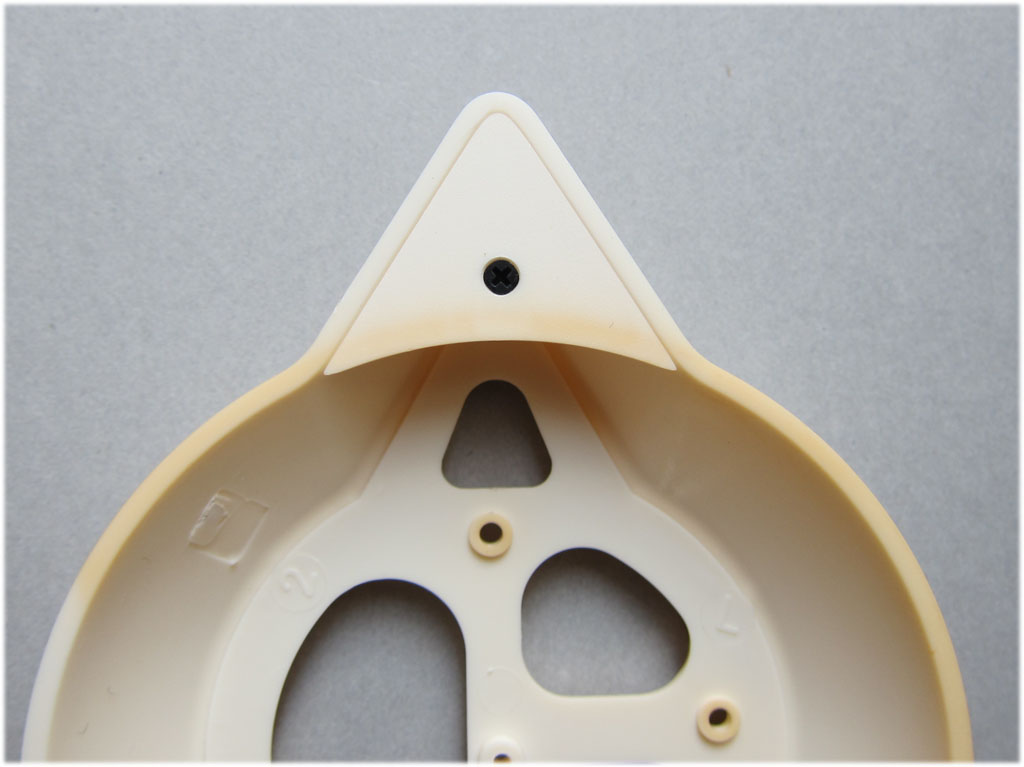
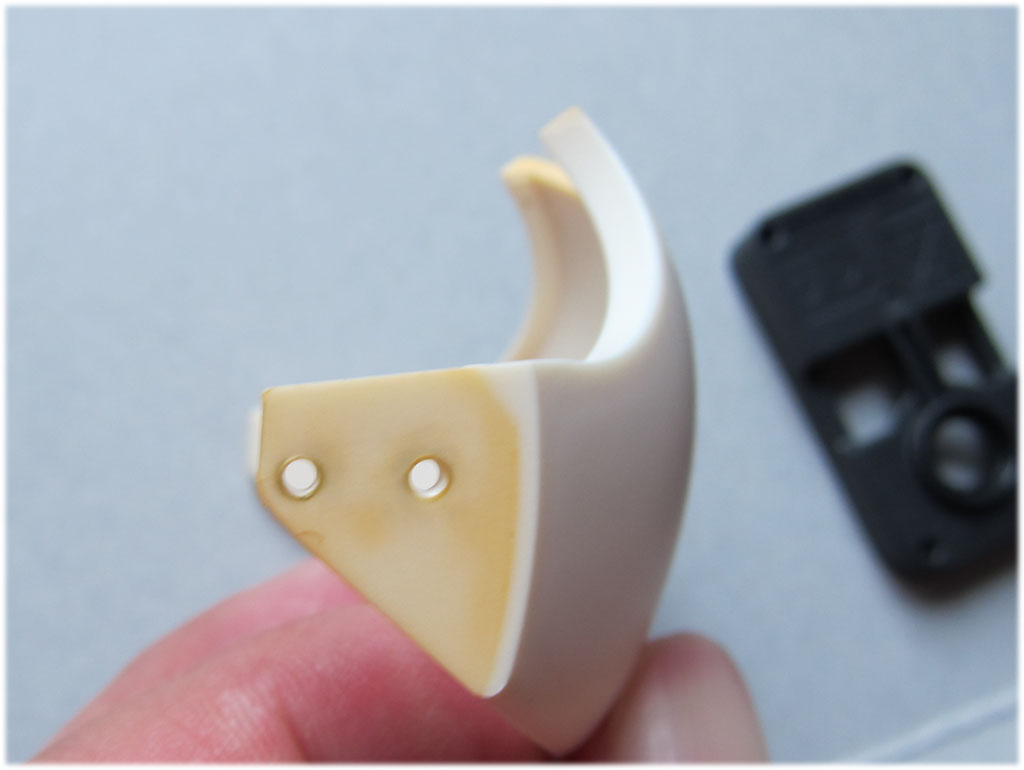
フェイスカバーにはこのような感じで裏側から取り付け、
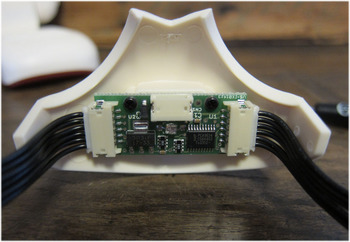
外側からは見えない部分ですがきれいに収まってます。
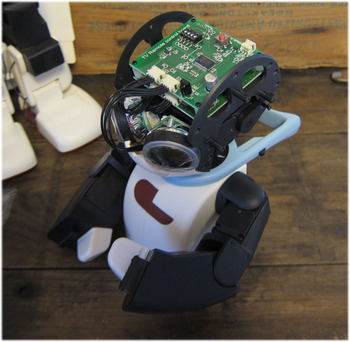
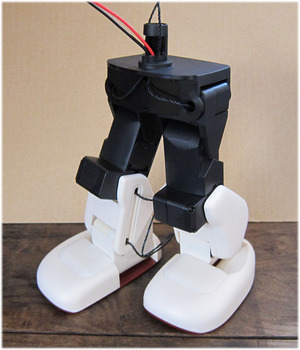
その後、頭のフレームに取り付け、
いかにもロボットという感じの状態です。
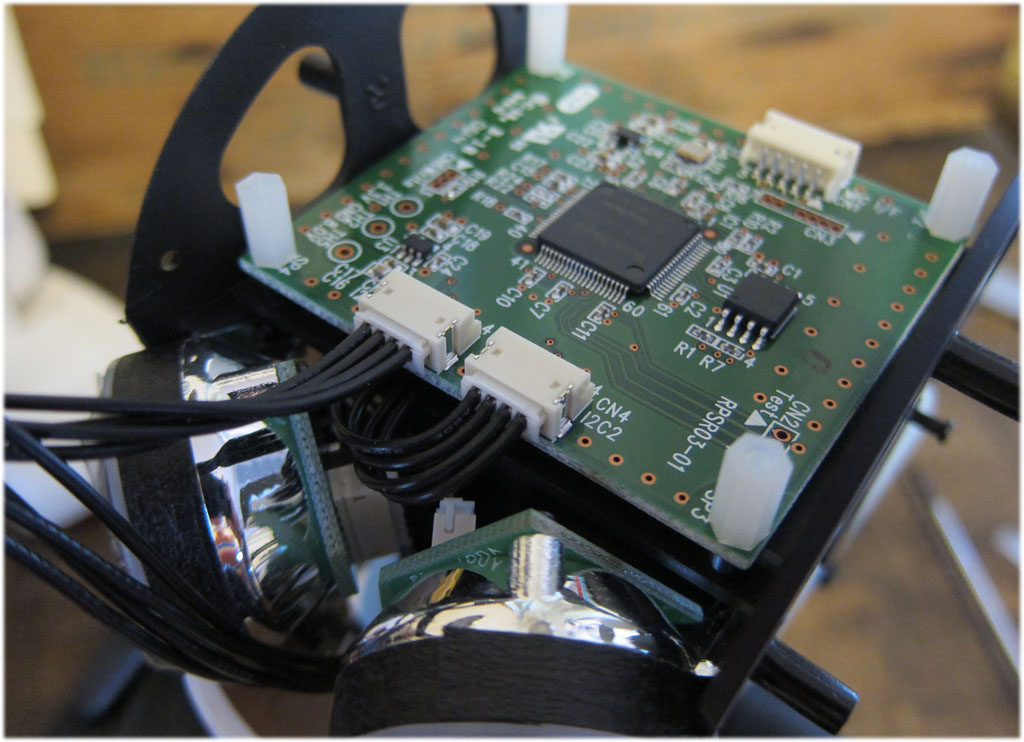
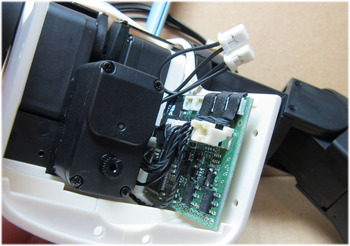
仕上げに頭部に入るボード一つ目、
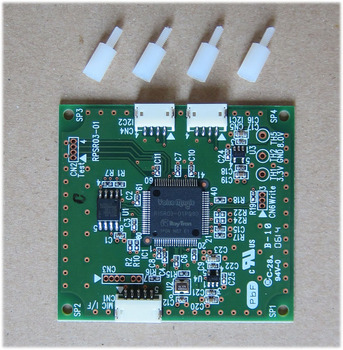
レイトロン社製の音声認識ボードです。
これを頭のフレームに装着、
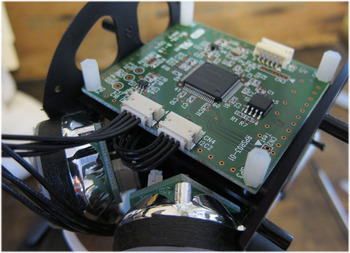
ますますロボットという感じです。
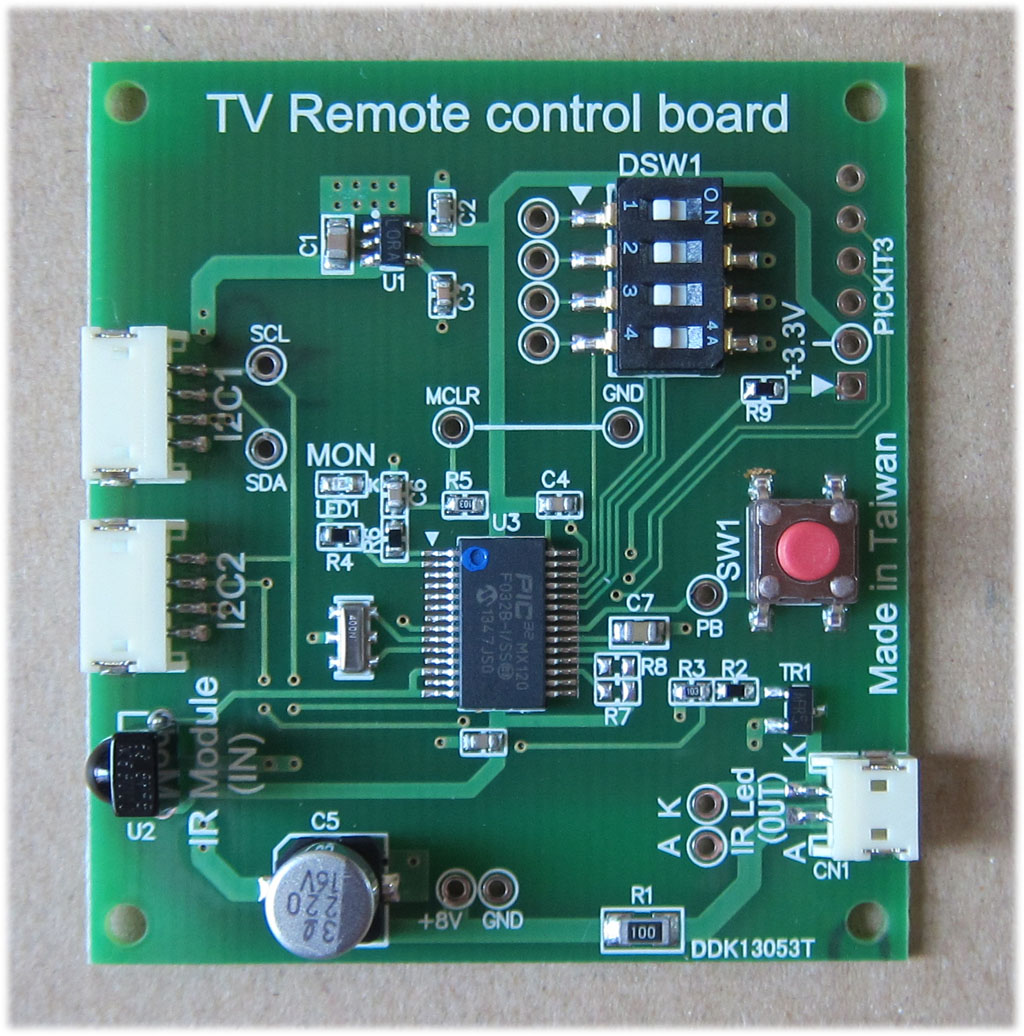
頭部に入るボードの2つめ、
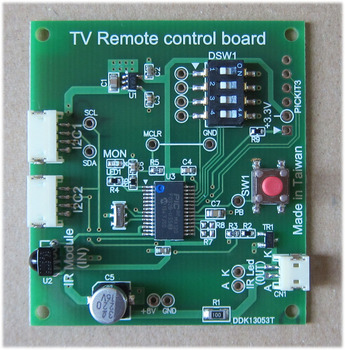
テレビのリモートコントロールボードです。
これを音声認識ボードの上に装着、
頭部が充実してきました。
65号~68号です。
まずは口と目を接続するボードが一つ、
真ん中にLEDがあり、口元が赤く光るようになっています。
これを2つの人感センサーと接続、
口へは透明なカバーで光を誘導します。
フェイスカバーにはこのような感じで裏側から取り付け、
外側からは見えない部分ですがきれいに収まってます。
その後、頭のフレームに取り付け、
いかにもロボットという感じの状態です。
仕上げに頭部に入るボード一つ目、

レイトロン社製の音声認識ボードです。
これを頭のフレームに装着、
ますますロボットという感じです。
頭部に入るボードの2つめ、
テレビのリモートコントロールボードです。
これを音声認識ボードの上に装着、

頭部が充実してきました。
週間『ロビ』を組み立てる No.61~64 [Robi]
週間『ロビ』も残り10号、
今回は61号~64号です。
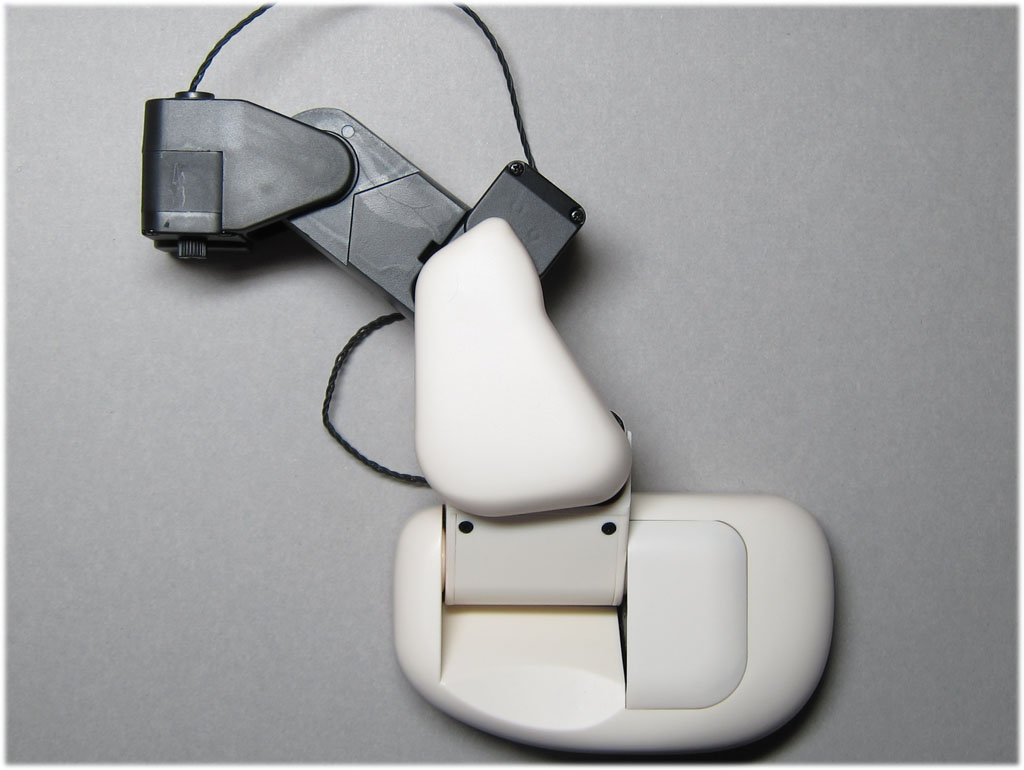
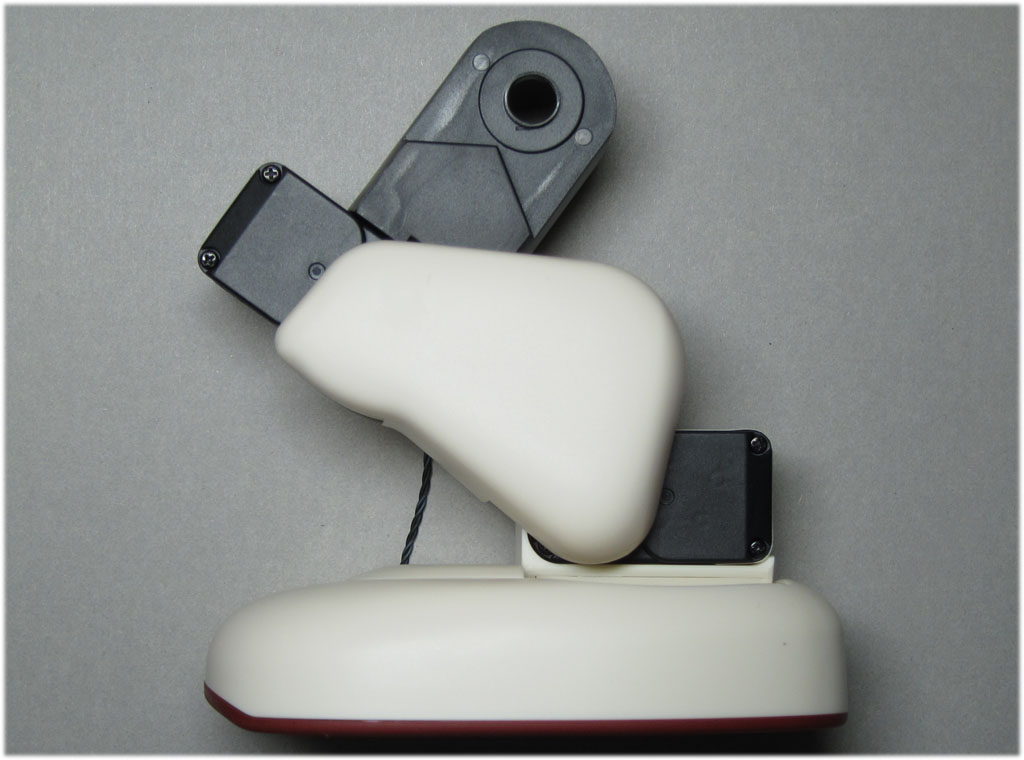
首の部分の3軸で動かすためのパーツを組み立て、

仕組みが良くわかります。
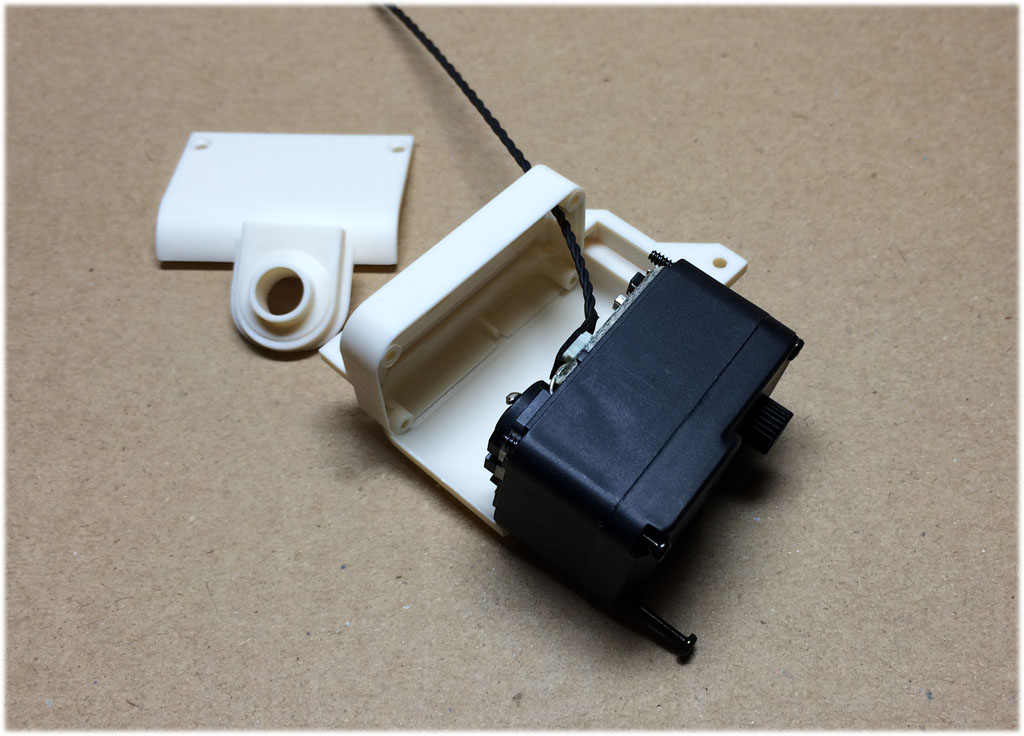
次に色移りパーツの交換を兼ねて頭のパーツを分解、

バラバラになりました。
目の部分にはシールを貼り付け、

ねじ受けの穴もきっちり埋めるのにはびっくりです。
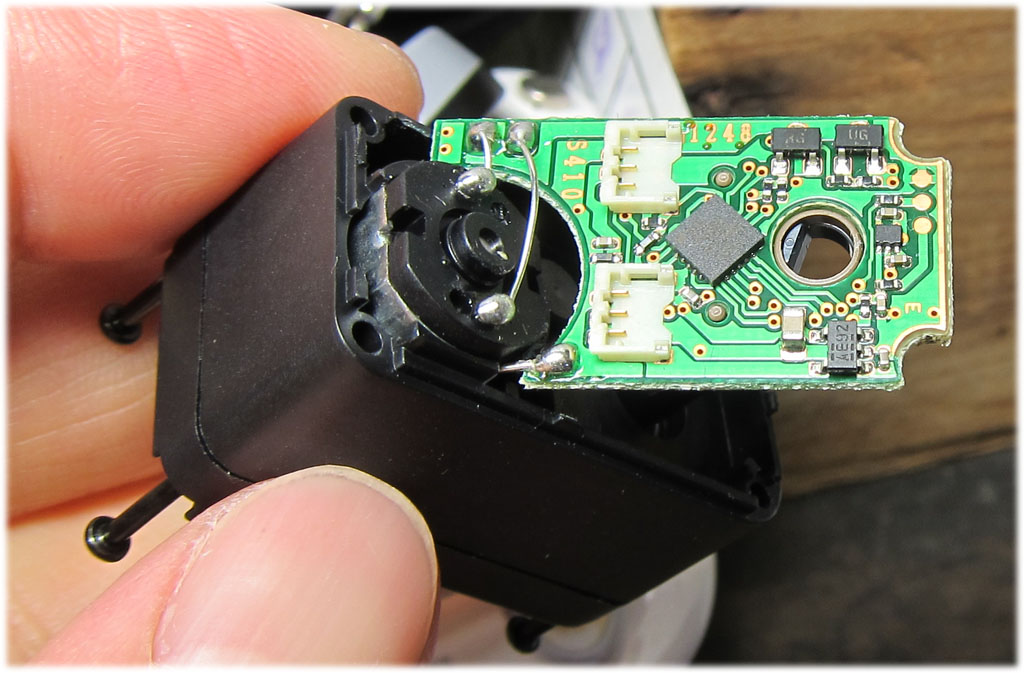
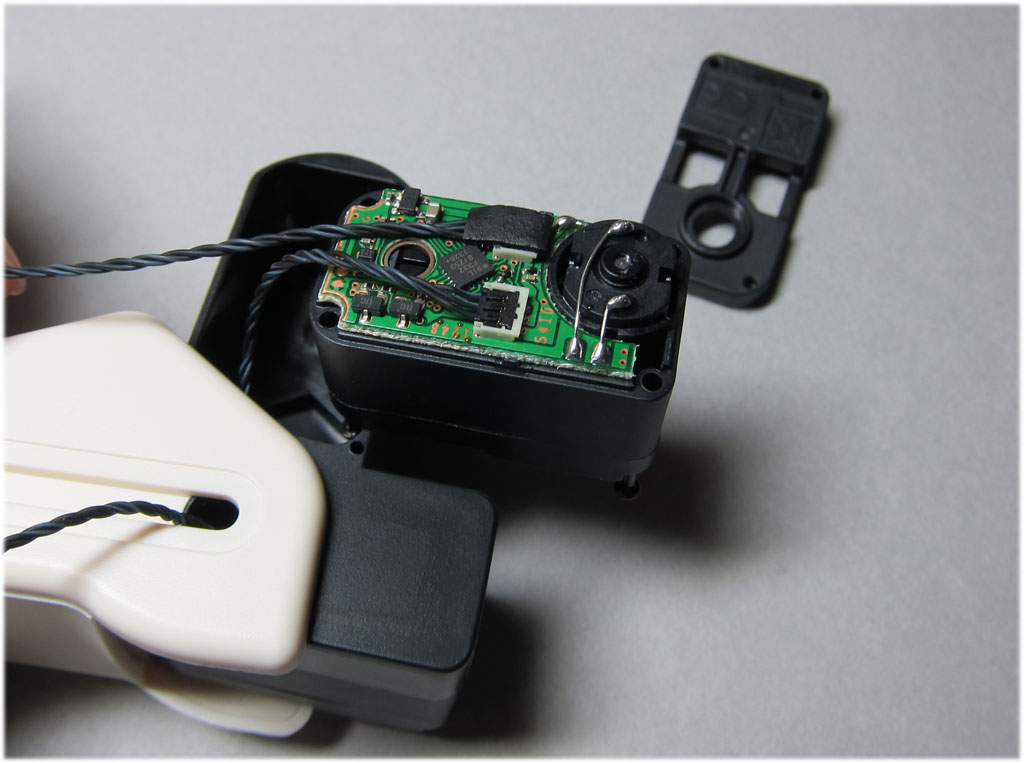
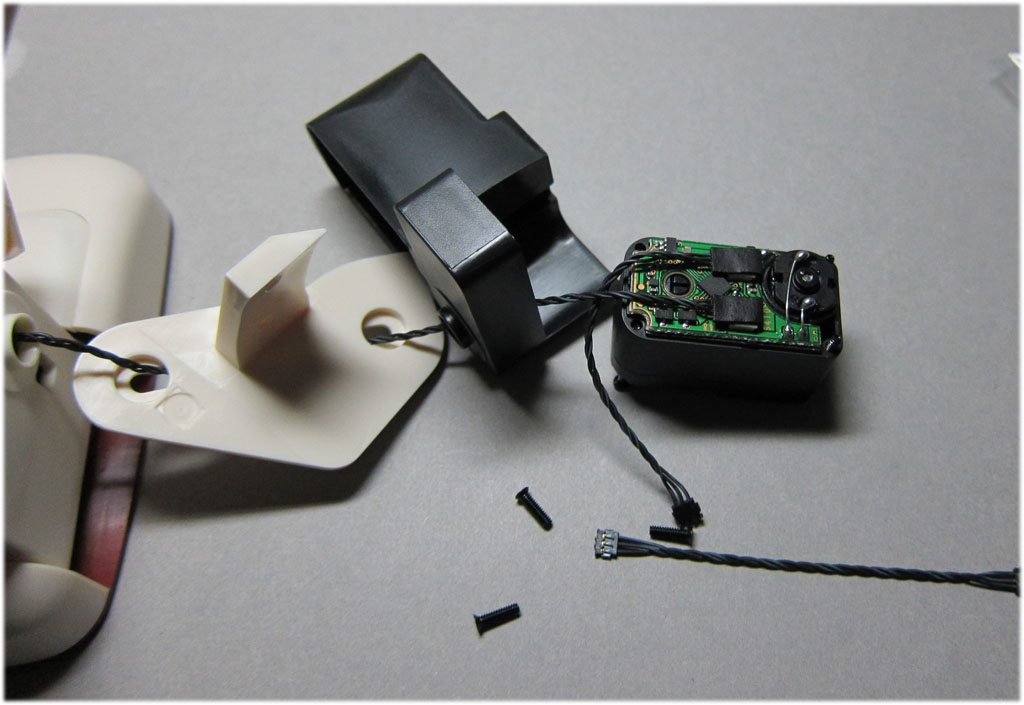
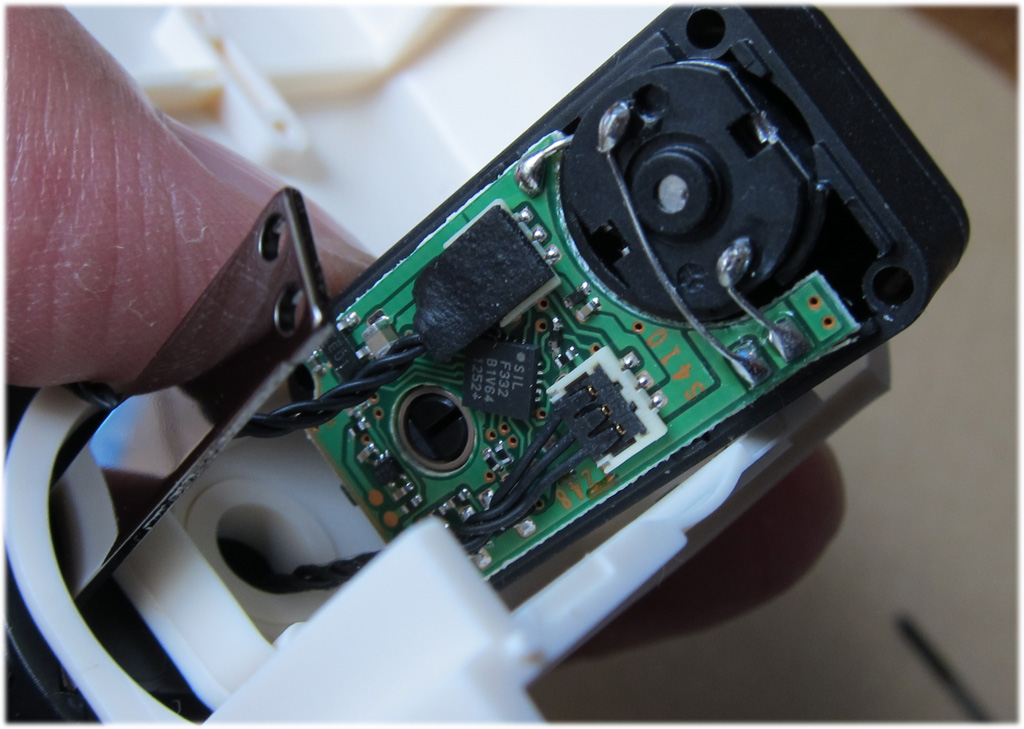
目の中に入るセンサーはこんな感じ、
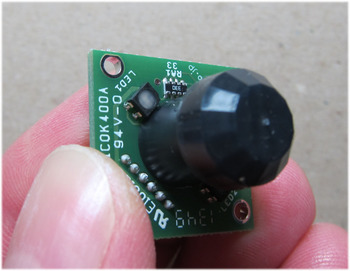
真ん中に人感センサーと周りに2つのLEDが付いてます。
最後にケーブルを付けて終了、
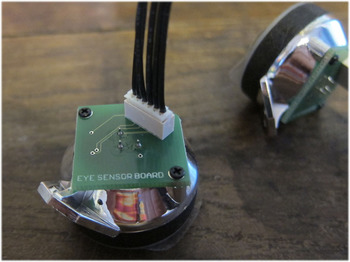
あと少しです。
今回は61号~64号です。
首の部分の3軸で動かすためのパーツを組み立て、

仕組みが良くわかります。
次に色移りパーツの交換を兼ねて頭のパーツを分解、

バラバラになりました。
目の部分にはシールを貼り付け、
ねじ受けの穴もきっちり埋めるのにはびっくりです。
目の中に入るセンサーはこんな感じ、
真ん中に人感センサーと周りに2つのLEDが付いてます。
最後にケーブルを付けて終了、

あと少しです。
週間『ロビ』を組み立てる No.52~60 [Robi]
だんだん形になってきた、
52号~60号です。
意味ありげなこんなパーツも、

ボールを使って遊ぶのでしょうか。
まずは脚を組み立て、
お、っという感じです。
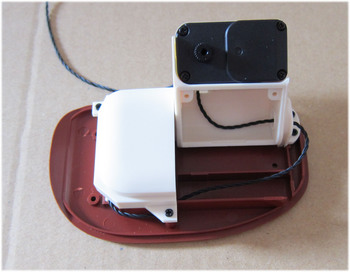
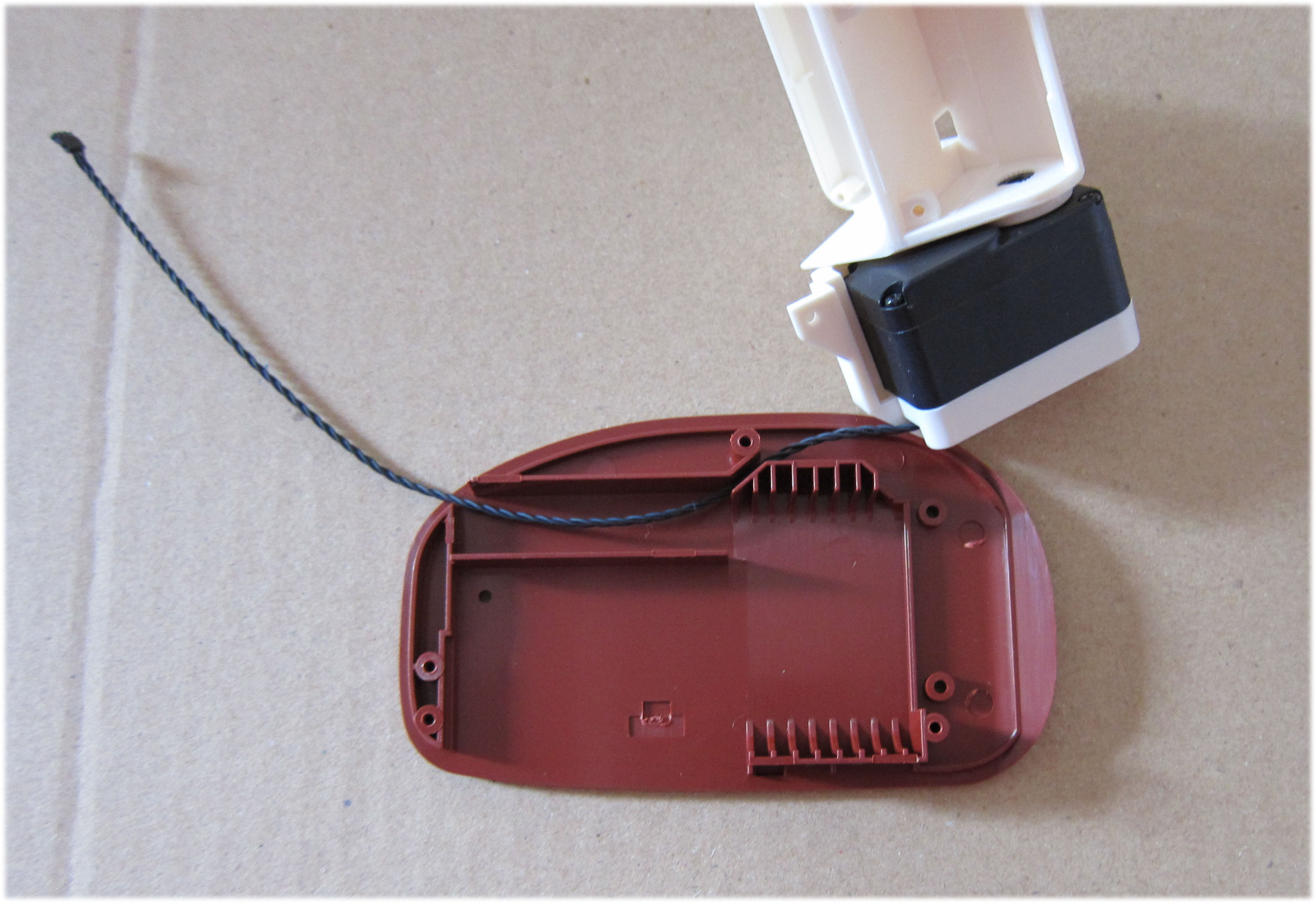
声の出るスピーカーパーツはこんな感じ、

以外としっかりしています。
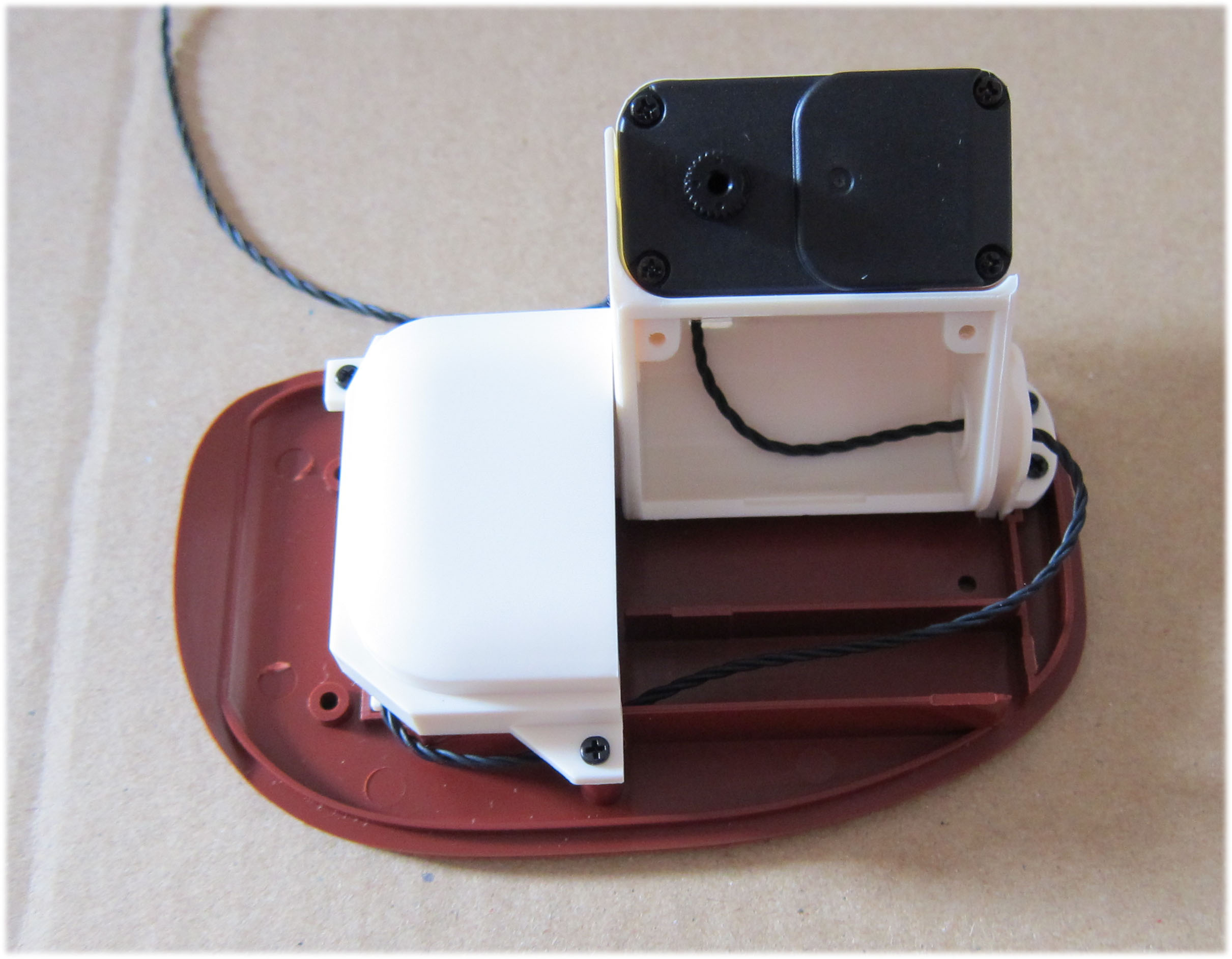
これを胸の部分に組み込み、
うまくできてます。
配線がちょっと難しい状況

慎重に進めます。
腰の中にもサーボが一つ、
スペースを無駄なく使っていてとても良い感じです。
首の部分にサーボを3つ取り付けて出来上がり、

上半身も形になってきました。
52号~60号です。
意味ありげなこんなパーツも、

ボールを使って遊ぶのでしょうか。
まずは脚を組み立て、
お、っという感じです。
声の出るスピーカーパーツはこんな感じ、

以外としっかりしています。
これを胸の部分に組み込み、
うまくできてます。
配線がちょっと難しい状況

慎重に進めます。
腰の中にもサーボが一つ、
スペースを無駄なく使っていてとても良い感じです。
首の部分にサーボを3つ取り付けて出来上がり、

上半身も形になってきました。
週間『ロビ』を組み立てる No.51 [Robi]
今回はもう一度、
51号です。
本来はSDカードのみだったはずですが、

別途こんなにパーツが付いてます。
その理由はこれ、
色移り問題の対策品です。
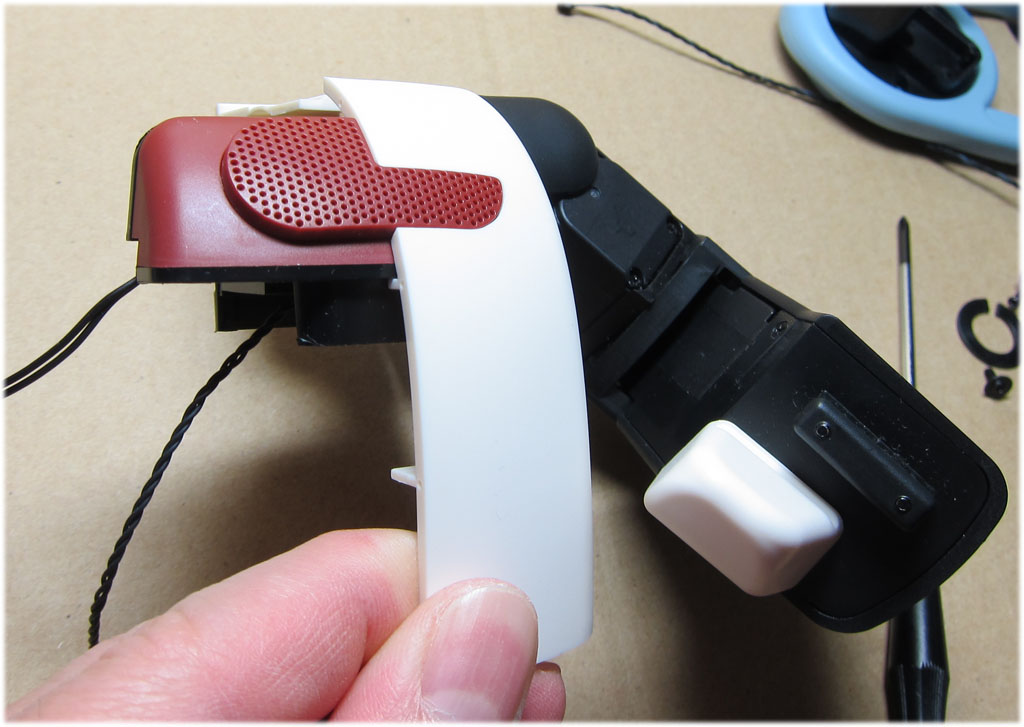
ということで分解開始、

腕の部分に使っている部品を交換します。
交換まえの状態はこんな感じ、

ほとんどバラバラです。
パーツの状態を比較するとこんな感じ、

理由はよく理解できていませんがこんなことがあるんですね。
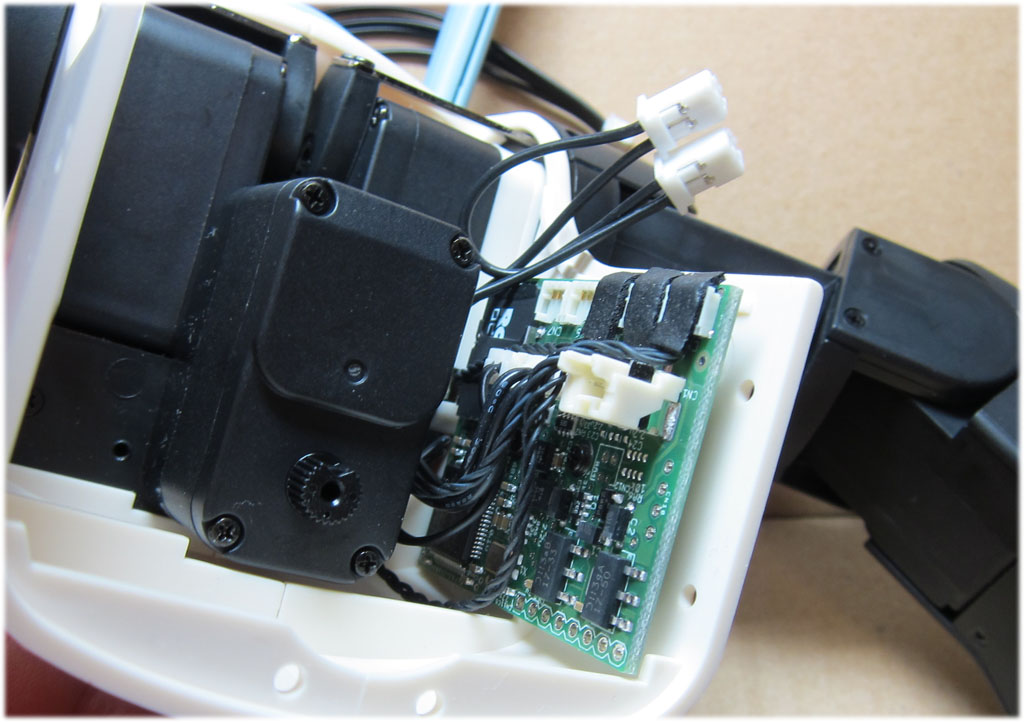
で、全てのパーツを交換した後にいよいよ動作確認、
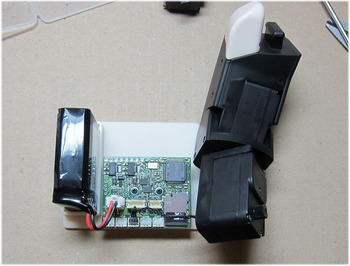
バッテリーを接続して動作を確認しました。
が、
足の一部で異臭と煙が発生、
該当のサーボはこんな感じ、
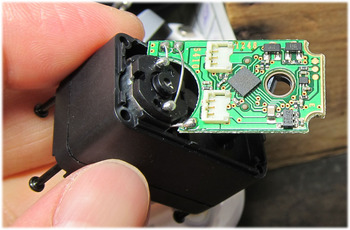
とくに焼損は見られませんでしたがまったく動作せず。仕方ないのでデアゴスティーニに電話してパーツを送っていただきました。
ということで、両手、両足が完成です。
51号です。
本来はSDカードのみだったはずですが、

別途こんなにパーツが付いてます。
その理由はこれ、
色移り問題の対策品です。
ということで分解開始、

腕の部分に使っている部品を交換します。
交換まえの状態はこんな感じ、

ほとんどバラバラです。
パーツの状態を比較するとこんな感じ、

理由はよく理解できていませんがこんなことがあるんですね。
で、全てのパーツを交換した後にいよいよ動作確認、
バッテリーを接続して動作を確認しました。
が、
足の一部で異臭と煙が発生、
該当のサーボはこんな感じ、
とくに焼損は見られませんでしたがまったく動作せず。仕方ないのでデアゴスティーニに電話してパーツを送っていただきました。
ということで、両手、両足が完成です。
週間『ロビ』を組み立てる No.43~51 [Robi]
週間『ロビ』も半分を過ぎて、
43号~51号です。
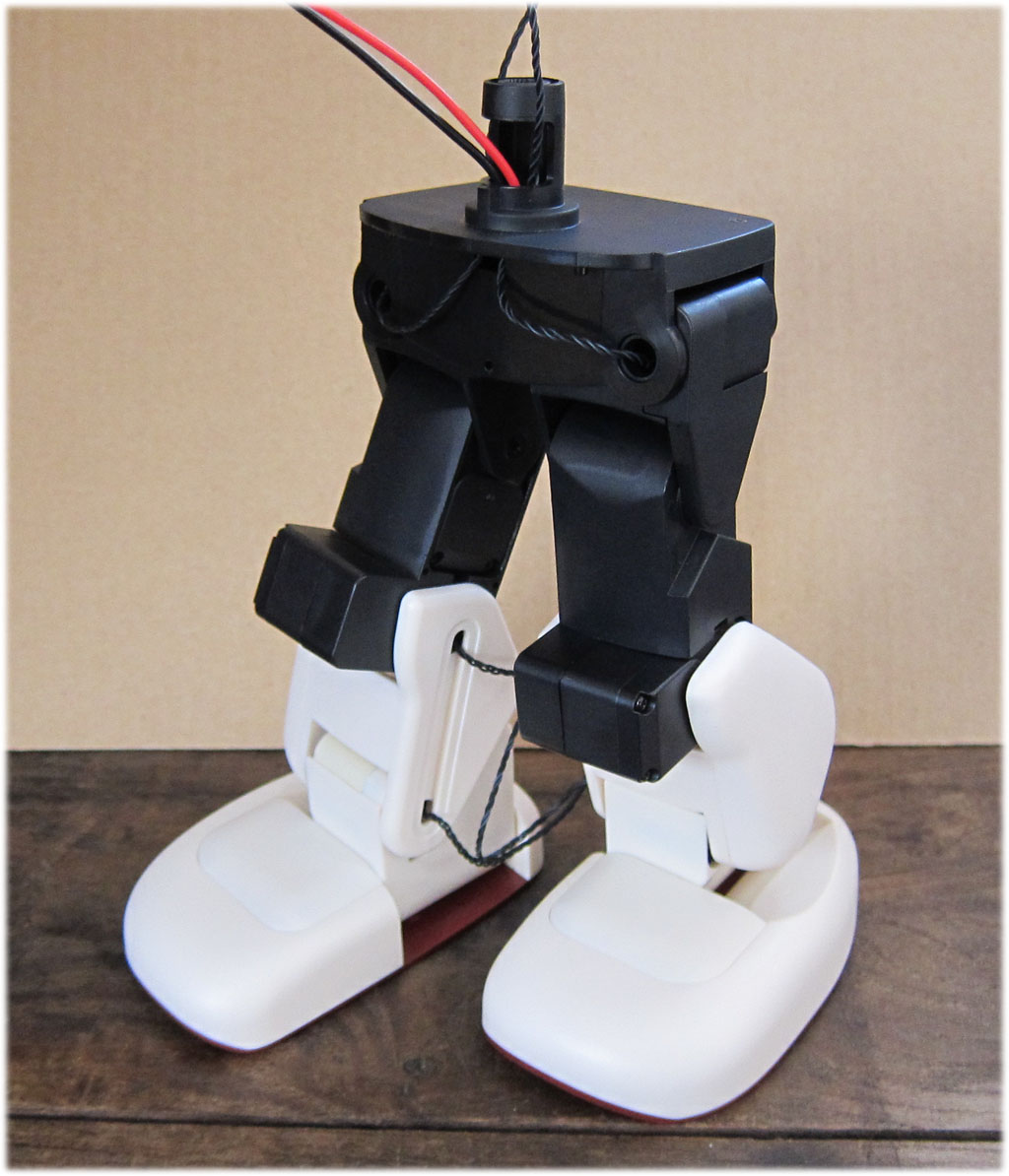
右足も次々にサーボを組み込み、
ケーブルの噛み込みが無いよう注意します。
この状態でほぼ完了、
股間接部分を含めると片足で5個のサーボと使いました。
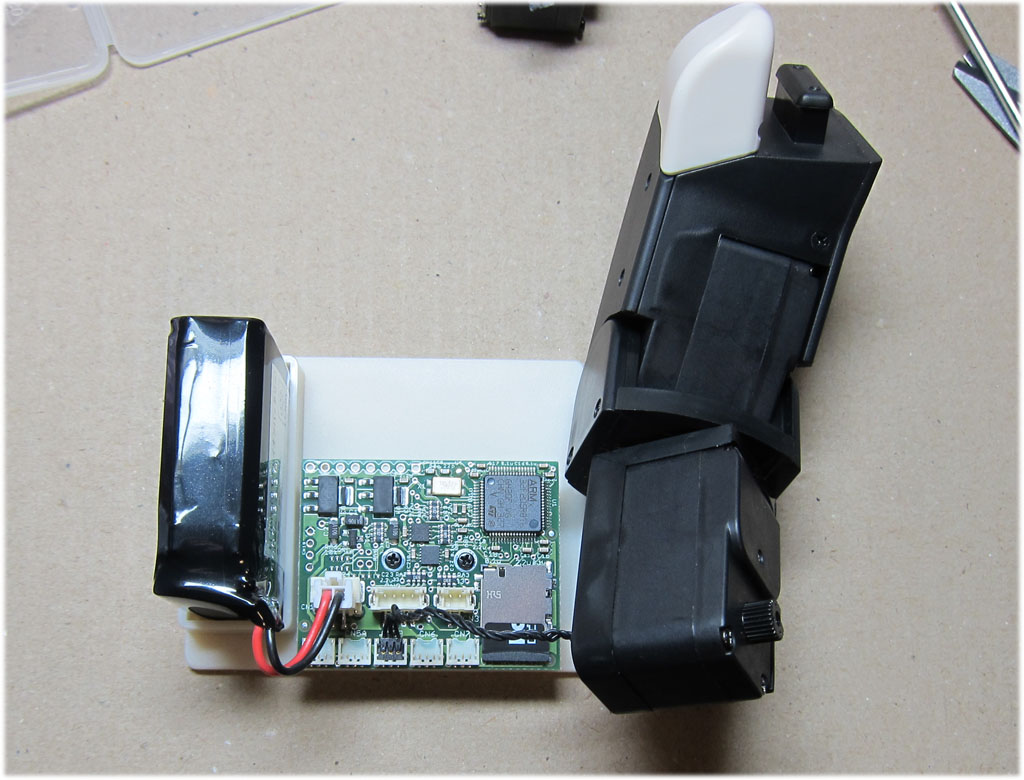
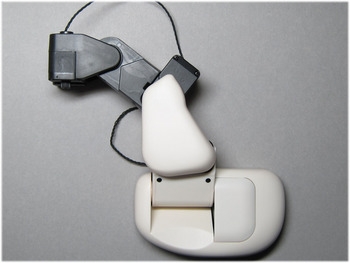
足の完成後は各号ともに動作確認用パーツが同梱されます。
バッテリーはこれ、

7.4V、800mAのリチウムイオンバッテリーとなっているので2セル構成でしょうか。
バランス充電するためのコネクターは無いので、意外と早くダメになるかもしれません。
充電用アダプターはこれ、

8.4V、800mAとラジコンカー用の簡易充電器と同じくらいの出力のようです。
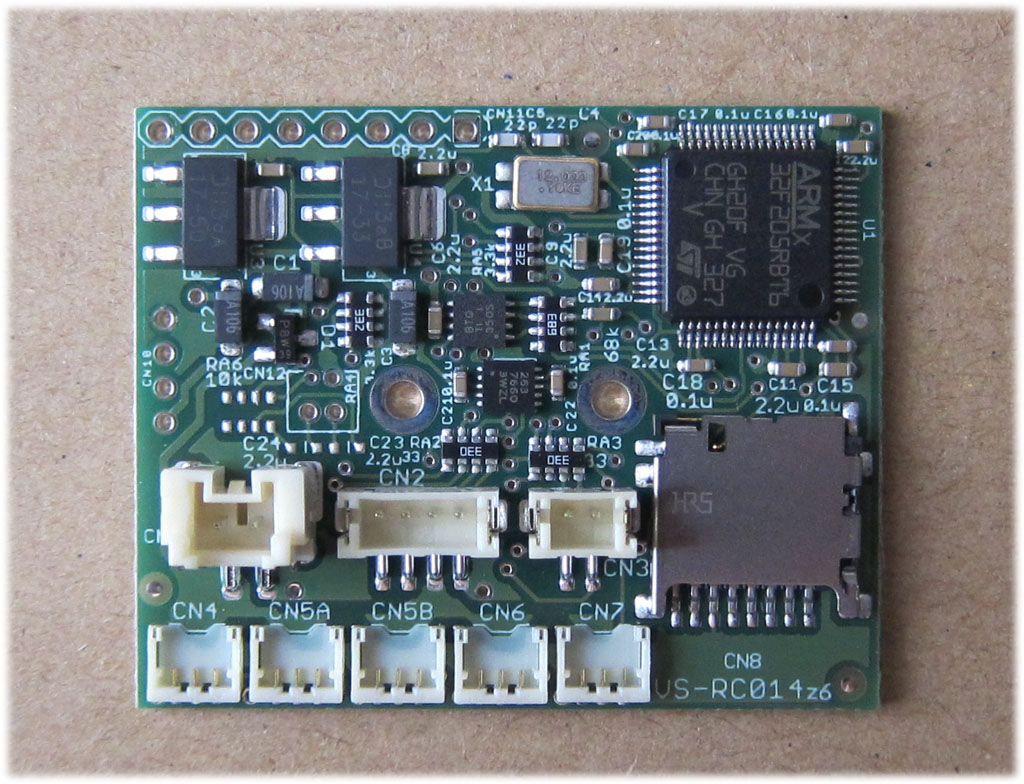
SDカードスロットと各サーボをドライブする基盤はこれ、
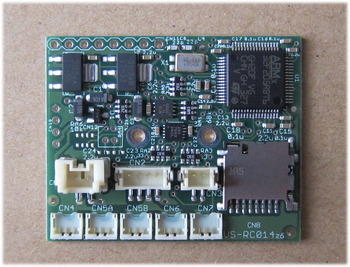
冊子には『マイコンボード』というパーツ名となっており、プログラム実行用のCPUはARMの32bit RISCコア 120 MHzのようです。
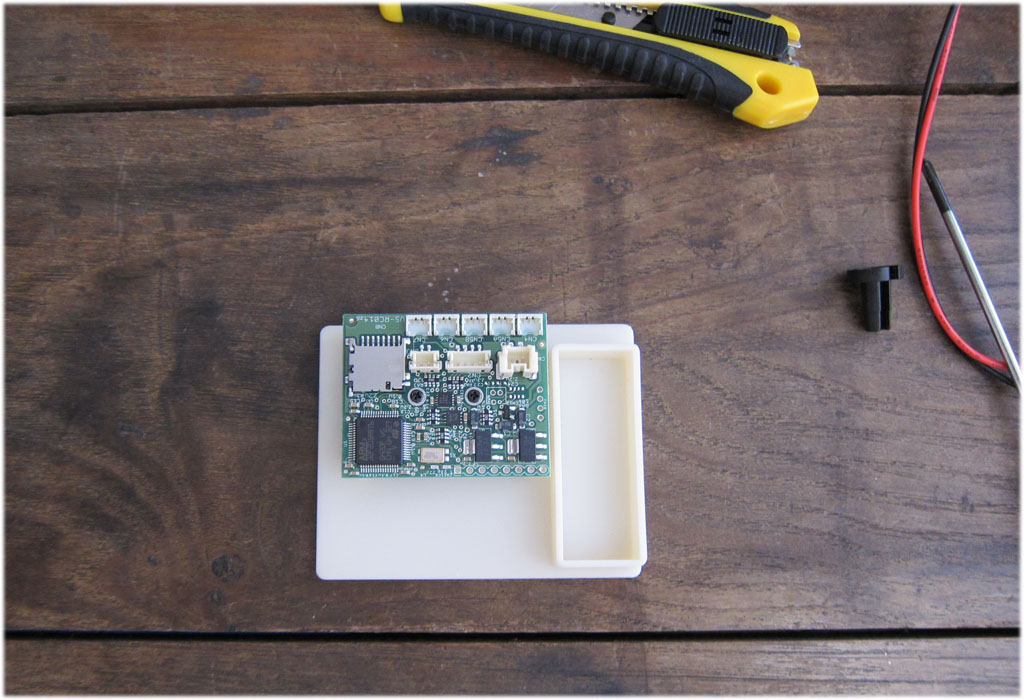
テスト用プレートにマイコンボードを取り付け、
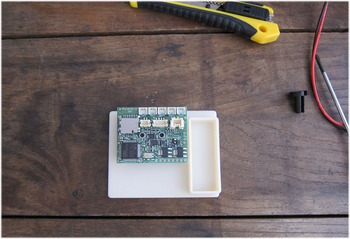
この後に各ケーブルを接続してテストを実施します。
43号~51号です。
右足も次々にサーボを組み込み、
ケーブルの噛み込みが無いよう注意します。
この状態でほぼ完了、
股間接部分を含めると片足で5個のサーボと使いました。
足の完成後は各号ともに動作確認用パーツが同梱されます。
バッテリーはこれ、

7.4V、800mAのリチウムイオンバッテリーとなっているので2セル構成でしょうか。
バランス充電するためのコネクターは無いので、意外と早くダメになるかもしれません。
充電用アダプターはこれ、

8.4V、800mAとラジコンカー用の簡易充電器と同じくらいの出力のようです。
SDカードスロットと各サーボをドライブする基盤はこれ、
冊子には『マイコンボード』というパーツ名となっており、プログラム実行用のCPUはARMの32bit RISCコア 120 MHzのようです。
テスト用プレートにマイコンボードを取り付け、
この後に各ケーブルを接続してテストを実施します。
週間『ロビ』を組み立てる No.34~42 [Robi]
さて今回も9号まとめて、
34号~42号です。
34号で付いてきたパーツはこれ、

両足に付けて歩きながら床掃除するためのモップとサーボケーブルです。
正直休みたい号ですが、サーボケーブルがあるのでそういうわけにもいきません。
で残りはひたすら左足、
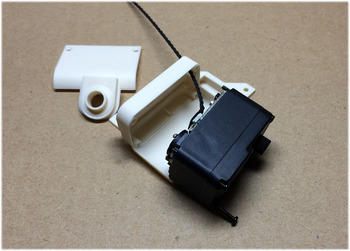
少しずつ進みます。
こんな感じの面倒な部分もありますが、
数分の作業で時間はかかりません。
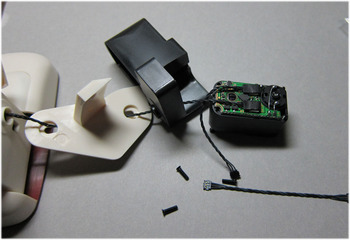
とてもよくデザインされており、

色的にダメな部分にはサーボの周りにアイボリーのテープを巻きつけるようになっており、こだわりを感じます。
で9号分が終了、

あと少しで両足が完成です。
34号~42号です。
34号で付いてきたパーツはこれ、

両足に付けて歩きながら床掃除するためのモップとサーボケーブルです。
正直休みたい号ですが、サーボケーブルがあるのでそういうわけにもいきません。
で残りはひたすら左足、
少しずつ進みます。
こんな感じの面倒な部分もありますが、
数分の作業で時間はかかりません。
とてもよくデザインされており、

色的にダメな部分にはサーボの周りにアイボリーのテープを巻きつけるようになっており、こだわりを感じます。
で9号分が終了、
あと少しで両足が完成です。
週間『ロビ』を組み立てる No.25~33 [Robi]
さて、約2か月分をまとめて、
25号~33号です。
最初に右足の中にサーボを1つ、

カバーを付けるとまったく見えない部分に入れます。
その後、足首の間接部分にもう一つ、
これで足首部分の横回転と縦回転が可能となります。
次に膝の部分、

またまた1つサーボを使います。
さらには股間接部分、

ここまでくると、パーツ号とサーボ号が繰り返して送られてきます。
最後に股間接のフレームを取り付けて右足がほぼ完成、

9号分の部品を使ってこれくらいですから投資額は考えたくもありません。
25号~33号です。
最初に右足の中にサーボを1つ、
カバーを付けるとまったく見えない部分に入れます。
その後、足首の間接部分にもう一つ、
これで足首部分の横回転と縦回転が可能となります。
次に膝の部分、

またまた1つサーボを使います。
さらには股間接部分、

ここまでくると、パーツ号とサーボ号が繰り返して送られてきます。
最後に股間接のフレームを取り付けて右足がほぼ完成、

9号分の部品を使ってこれくらいですから投資額は考えたくもありません。
週間『ロビ』を組み立てる No.16~24 [Robi]
すごく単調なのでまとめて、
16号~24号です。
14号までが右腕だったので15号からは左腕の作成開始、

1つのかたまりを作成するのに2~3号分のパーツを使います。
基本的には右腕の作成順序とほぼ同じ、

とくに難しい部分はありません。
ヒジの部分と肩の部分にサーボが入り、

1本の腕が完成。
胴体内部にもサーボが入って結合、

左腕部分が完成しました。
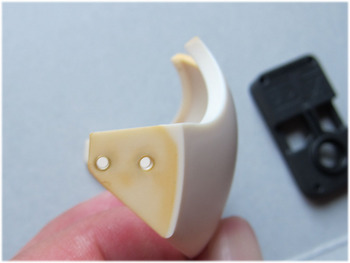
最後の24号では右足首の作成を開始、

さっそくサーボを1つ使いました。
と、ここで他でも話題になっていた色うつり問題を確認、
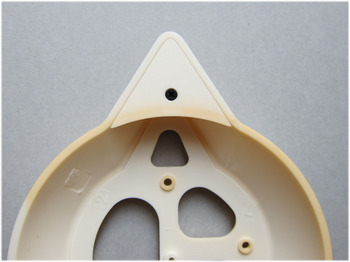
黒のパーツをつけていた周辺部分が茶色になっています。
顔の部分もこんな感じ、
皆さん同じようなので、対策品が出るのを待ちましょう。
16号~24号です。
14号までが右腕だったので15号からは左腕の作成開始、

1つのかたまりを作成するのに2~3号分のパーツを使います。
基本的には右腕の作成順序とほぼ同じ、

とくに難しい部分はありません。
ヒジの部分と肩の部分にサーボが入り、
1本の腕が完成。
胴体内部にもサーボが入って結合、

左腕部分が完成しました。
最後の24号では右足首の作成を開始、
さっそくサーボを1つ使いました。
と、ここで他でも話題になっていた色うつり問題を確認、
黒のパーツをつけていた周辺部分が茶色になっています。
顔の部分もこんな感じ、
皆さん同じようなので、対策品が出るのを待ちましょう。
週間『ロビ』を組み立てる No.15 [Robi]
今日も朝からランニング、
15号です。
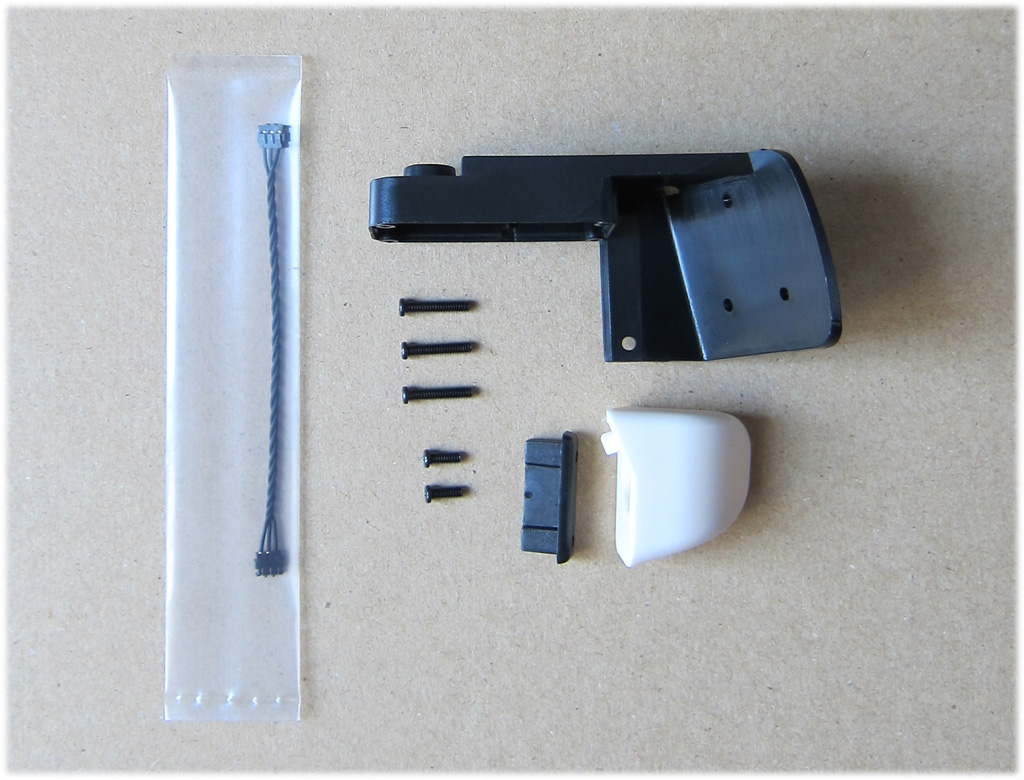
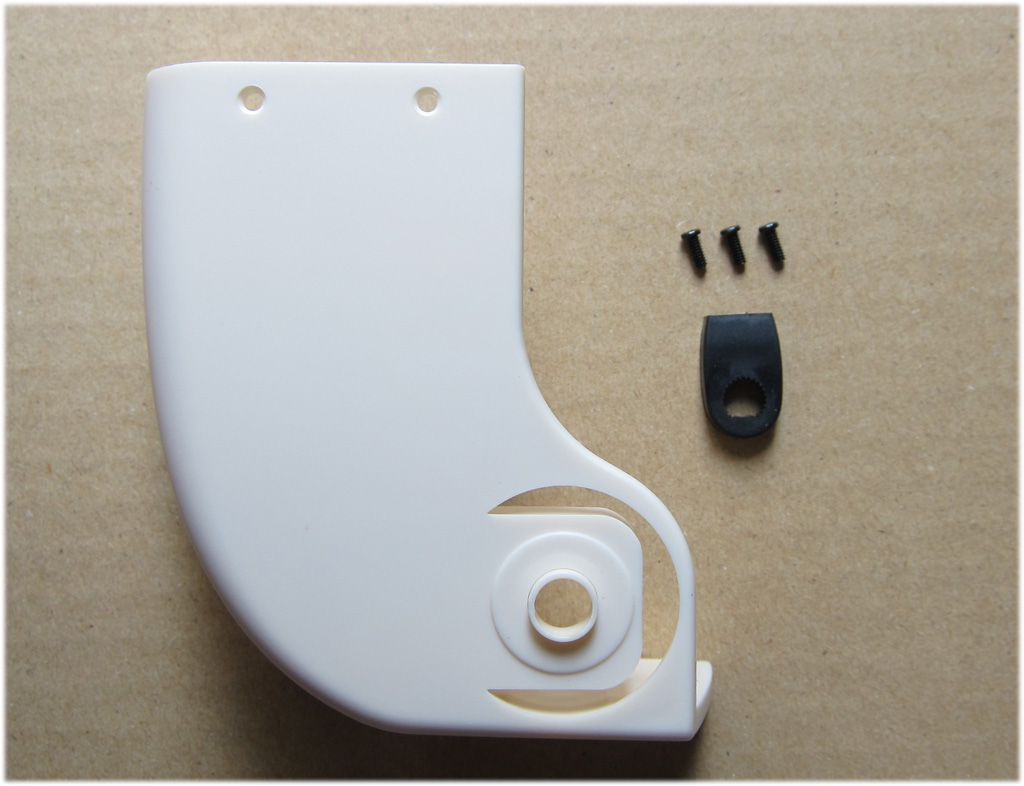
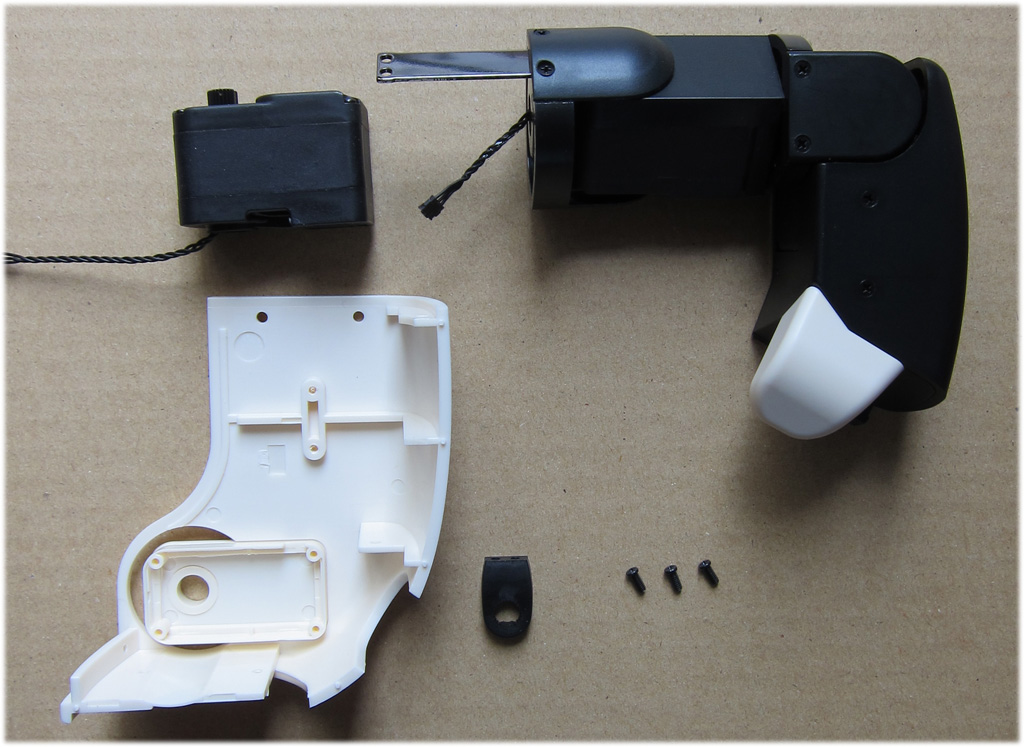
入っていたパーツはこんな感じ、
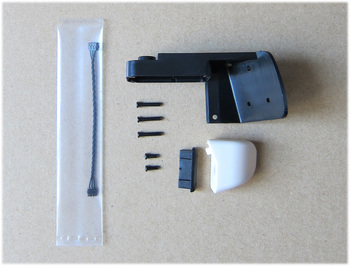
サーボケーブルが入っているということは、次回パーツはサーボ単品の予感がします。
で、組立開始。
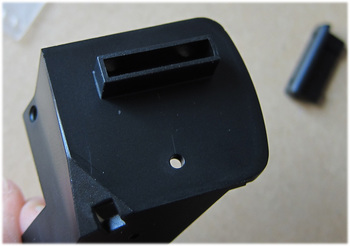
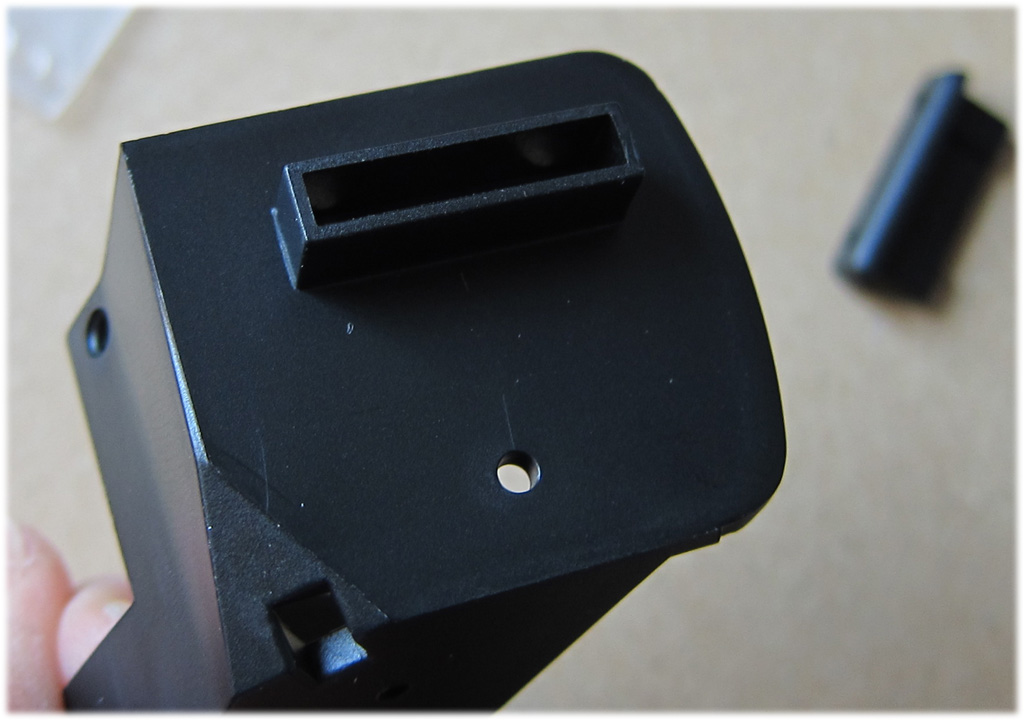
こんな状態のパーツに、
フタみたいなパーツを装着してねじ止め、
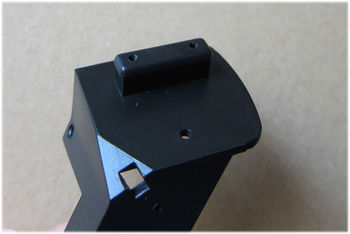
右腕を作るときも不思議に思ってましたが、この部分をわざわざねじ止めして組み立てる意味がわかりません。
ということで指を取り付けて完成、
今回はねじ3本でした。
15号です。
入っていたパーツはこんな感じ、
サーボケーブルが入っているということは、次回パーツはサーボ単品の予感がします。
で、組立開始。
こんな状態のパーツに、
フタみたいなパーツを装着してねじ止め、
右腕を作るときも不思議に思ってましたが、この部分をわざわざねじ止めして組み立てる意味がわかりません。
ということで指を取り付けて完成、
今回はねじ3本でした。
週間『ロビ』を組み立てる No.14 [Robi]
関東では梅雨に入ったようですが良い天気、
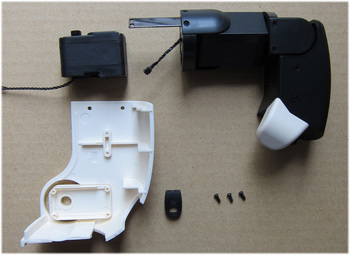
今週は14号です。
付録のパーツはこんな感じ、
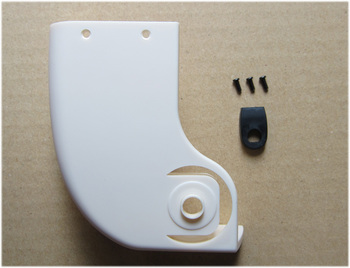
腕を取り付けるパーツが2点、ねじ3本です。
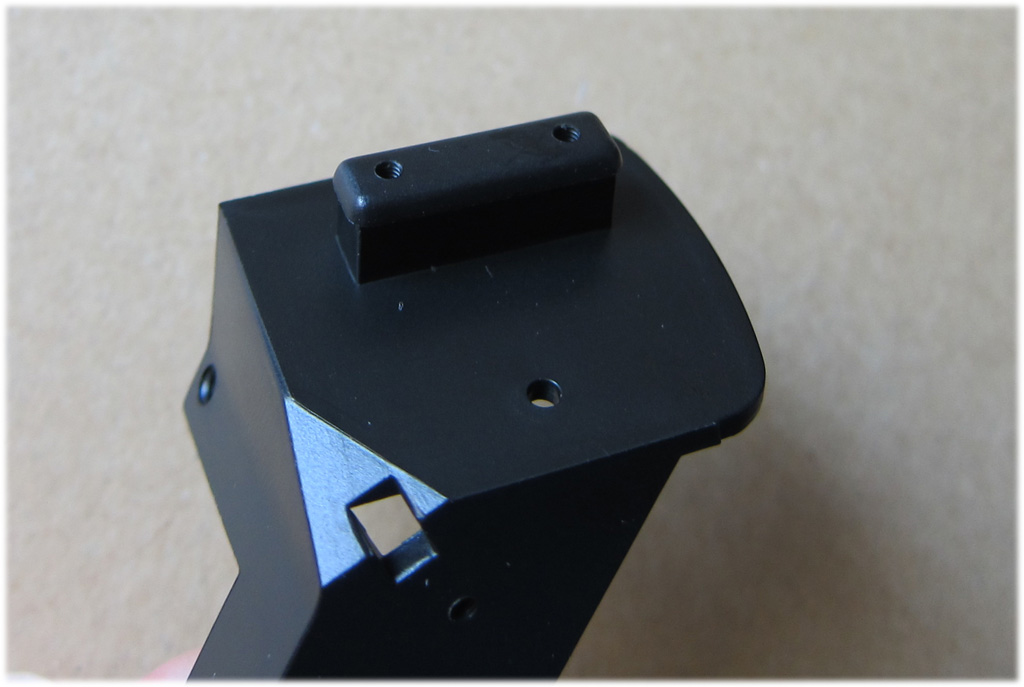
前回まで組み立てたパーツと一緒に組み立て、
腕とサーボを組み立てます。
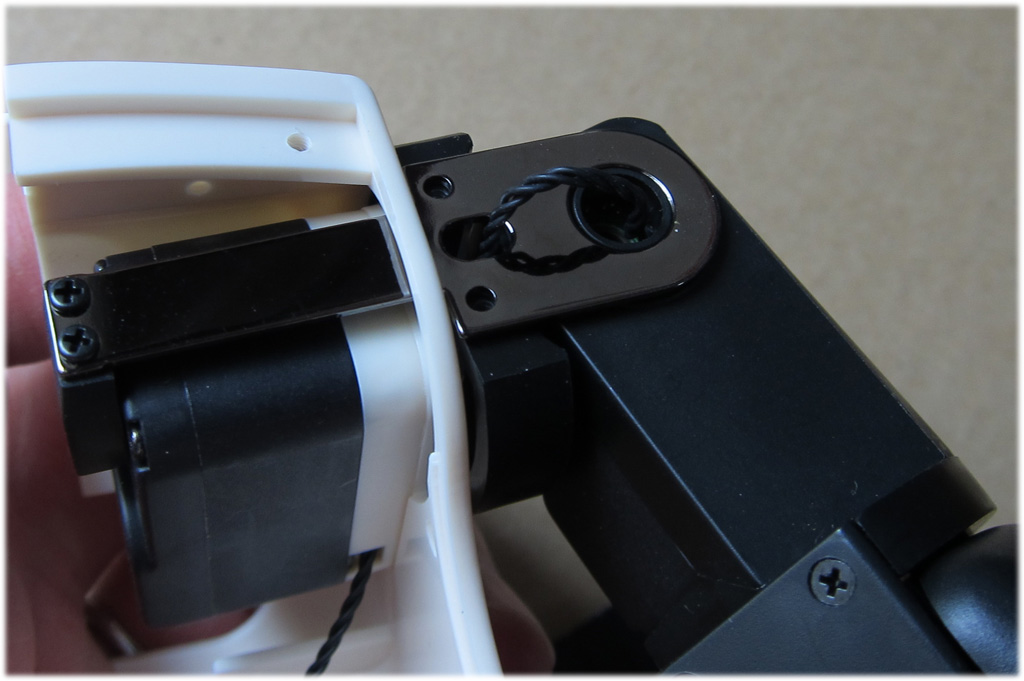
まずは肩の部分にサーボを取り付けるため腕からのケーブルを接続、
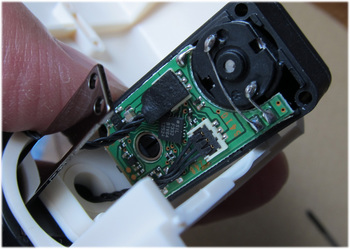
外からケーブルを見えないようにするため以外とタイト、雑に扱うとケーブル噛むので慎重に作業します。
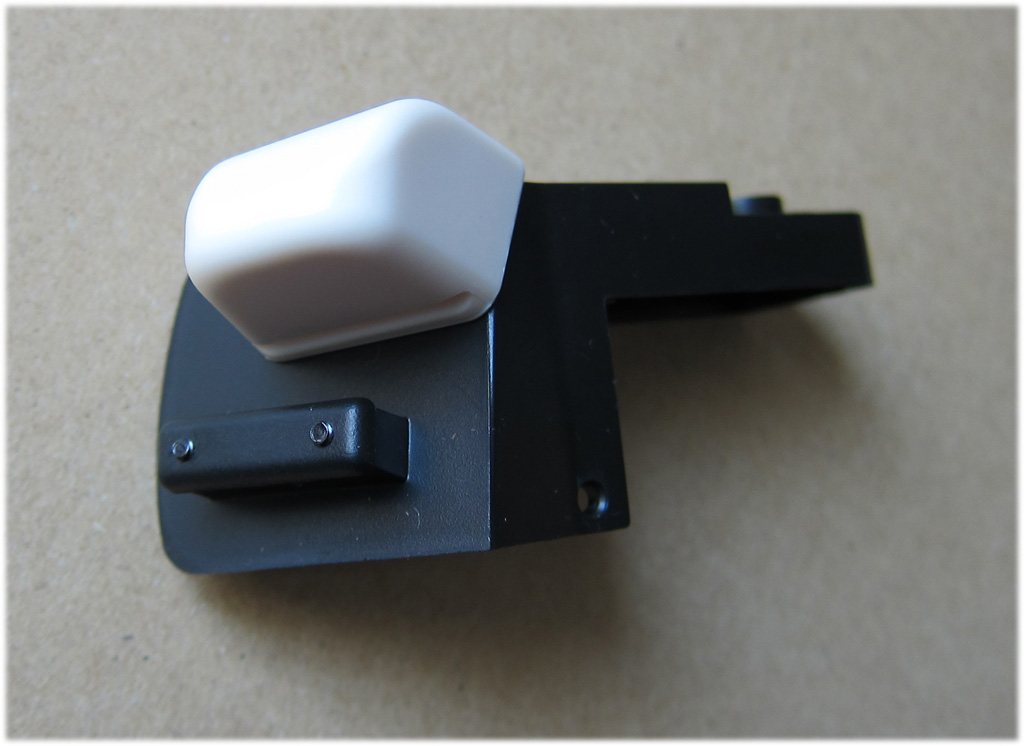
その後腕をサーボに取り付け、
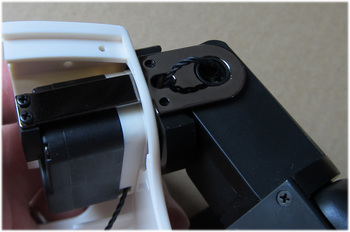
ケーブルを調整して取り付けを完了します。
で、今回分は完成、

やっと片腕が形になりました。
次からは左腕1~2ヶ月の作業、いやいや長いです。
今週は14号です。
付録のパーツはこんな感じ、
腕を取り付けるパーツが2点、ねじ3本です。
前回まで組み立てたパーツと一緒に組み立て、
腕とサーボを組み立てます。
まずは肩の部分にサーボを取り付けるため腕からのケーブルを接続、
外からケーブルを見えないようにするため以外とタイト、雑に扱うとケーブル噛むので慎重に作業します。
その後腕をサーボに取り付け、
ケーブルを調整して取り付けを完了します。
で、今回分は完成、

やっと片腕が形になりました。
次からは左腕1~2ヶ月の作業、いやいや長いです。



